Статьи >> Высокоточная навигация на основе кинематики реального времени RTK для приёмников НАВИА
В статье представлены новые возможности навигационных приемников производства НАВИА, такие как поддержка высокоточной навигации на основе фазовых измерений и функции RTK.
Приемники НАВИА ML8089F на базе чипсета STA8089 и планируемой серии CL8090F/CL8090FS на базе чипсета STA8090 с версией программного обеспечения 4.5.7CP, универсальной для перечисленных устройств, поддерживают навигационные системы GPS/Galileo/ГЛОНАСС/BeiDou/QZSS. Они работают в диапазоне L1 и поддерживают 48 обычных каналов и дополнительно два канала быстрого определения. Это классические современные навигационные приемники общего назначения, для которых поддержка высокоточной навигации на основе фазовых измерений — это программная опция, реализующая возможности чипсета STA8089/STA8090 и не увеличивающая стоимость самого приемника. Однако следует понимать, что для полноценной реализации этой функции потребуется несколько более совершенная антенна и весь антенный тракт конечного устройства в целом.
Функция фазовых измерений открывает новые возможности для повышения точности решения навигационной задачи для навигационного приемника, но все возможности фазовых измерений не могут быть раскрыты без применения внешней корректирующей информации о быстро меняющейся задержке сигнала спутников. Чем чаще эта информация обновляется, тем выше средняя получаемая точность измерений позиции, и применение RTK (Real Time Kinematic — «кинематика реального времени») — это один из самых эффективных и современных способов получения субдециметровой (в диапазоне L1) и даже субсантиметровой точности (в диапазоне L1+L2). Требуется видимость не менее пяти спутников как для приемника, уточняющего свое положение (ровера), так и для приемника, знающего свое положение с высокой точностью (базовой станции, БС). В реальности чем больше спутников участвует в решении навигационной задачи, чем лучше видимость открытого неба в точке измерений, антенна имеет наилучшие параметры, а высокочастотная часть устройства более качественно спроектирована, тем выше точность решения, причем для БС требования к оборудованию даже выше, чем для ровера.
Чтобы обеспечить пользователю свободу выбора в реализации вышеперечисленных возможностей, приемники НАВИА с версией программного обеспечения 4.5.7CP могут передавать «сырые» данные измерений псевдодальностей и другие параметры измерений по каждому спутнику для внешней обработки в служебных сообщениях STMicroelectronics в составе потока NMEA0183 с заголовком сообщений $PSTM и в потоке RTCM3. Таким образом, навигационная задача может быть решена во внешнем приложении, например в программном пакете RTKLib, который является свободно распространяемым программным обеспечением, доступным в виде исполняемых файлов и исходных кодов на сайте [3].
Данный программный продукт позволяет решить навигационную задачу совместно по данным измерений параметров спутников в БС, которая точно знает свое местоположение, и данным измерений параметров тех же спутников на ровере, положение которого необходимо определить с высокой точностью, как в режиме реального времени, так и в постобработке. По сути, для БС, положение которой известно, периодически вычисляется разница между расчетными данными и реально измеренными. Это и будет погрешностью, данные о которой по каждому спутнику используются при расчете позиции ровера. У RTKLib очень широкие возможности, поэтому пакет уже успел стать практически стандартом для применения в геодезических задачах.
Для первоначальных тестов оборудования в режиме реального времени можно не передавать данные через GSM-модем: достаточно длинного кабеля, чтобы обеспечить расстояние между антеннами БС и ровера не менее нескольких метров для статических тестов. Для тестов в динамике можно перемещать только антенну ровера, насколько позволяет ее кабель. Этого вполне достаточно для оценки точности навигационного решения, ведь речь идет о точности, измеряемой сантиметрами, поэтому больших перемещений приемника не нужно.
Конечно, для начала экспериментировать с собственной БС проще и нагляднее, но с учетом того, что существует достаточно много коммерческих сетей, предоставляющих данные в формате RINEX на определенные периоды для определенного региона покрытия на коммерческой основе, можно в дальнейшем использовать эти данные в режиме постобработки вместо данных собственной БС. С учетом того что удаленность выбранной БС от ровера не должна превышать 30 км, можно сказать, что покрытие таких сетей в крупных городах обычно практически полное, а вне крупных населенных пунктов покрытие частичное. Возможно получение данных БС в реальном времени через сетевой протокол NTRIP, а также любой другой способ получения данных от коммерческого поставщика.
Оборудование
Для первичных тестов использовались две отладочные платы NAVIA GPS-GLONASS DEMOBOARD для приемников НАВИА ML8089F (рис. 1, 2), изначально разработанные для демонстрации инерциальной навигации на базе данного типа приемников, но эти возможности приемников не рассматривались, поэтому гироскопы и разъемы для получения данных одометра не устанавливались. Одна плата использовалась как БС, другая — как ровер. Антенны находились рядом на расстоянии примерно 4 м на высоте не более 2 м от земли, измерения проводились на открытой местности без перемещения антенны ровера. Обе платы были подключены к одному ноутбуку с запущенным на нем программным обеспечением RTKLib.
-

- Рис. 1 Модуль приемника НАВИА ML8089F

-

- Рис. 2 Демонстрационная плата для приемников НАВИА ML8089F


Рис. 3 Антенна НАВИА MPR107
Применялись антенны с подавлением отраженного сигнала НАВИА MPR107 (рис. 3) для БС и более компактные Tallisman TW2400 (рис. 4) для ровера. При размещении антенн для экспериментов с высокоточной навигацией следует учитывать, что, если для высокоточных измерений (в данном случае) используются обычные антенны, кабели не должны быть перепутаны между собой, разъемы SMA хорошо затянуты и т. д. В общем, к экспериментам надо готовиться тщательно, иначе хорошего результата не получить.
Обработка в реальном времени
Для работы в реальном времени с RTKLib в приемнике НАВИА ML8089F необходимо включить выдачу данных в формате RTCM3, поддерживаемом программой RTKNAVI, также входящей в RTKLib.
Это можно сделать последовательностью команд, подавая их на порт приемника НАВИА ML8089F с помощью программы navia_viewer доступной на сайте [1], или через любую терминальную программу, или средствами RTKLib, что мы и сделаем.

Рис. 4 Антенна Tallisman TW2400
После подачи данной последовательности команд выдача потока NMEA сменится на поток RTCM3.
$PSTMSETPAR,1227,9,2
$PSTMSAVEPAR
$PSTMSETPAR,1227,20020,1
$PSTMSAVEPAR
$PSTMSRR
Переключить обратно на выдачу потока NMEA можно следующей последовательностью команд (прием команд NMEA при выдаче потока RTCM3 сохраняется):
$PSTMSETPAR,1227,9,1
$PSTMSAVEPAR
$PSTMSETPAR,1227,20020,2
$PSTMSAVEPAR
$PSTMSRR
Также параметры порта RTCM можно настроить в следующих конфигурационных регистрах приемника с помощью navia_viewer на вкладке «Параметры»:
CDB-ID 138 – RTCM PORT SETTING
CDB-ID 139 – RTCM PORT BAUDRATE SETTING
Но это нам не понадобится. Если команды подаются через терминал, то признаком их успешного выполнения будет смена потока сообщений NMEA0183 на сплошной поток байтов — RTCM3 представляет собой бинарный протокол со сложной структурой пакетов.
В потоке RTCM3 приемник может передавать следующие сообщения:
RTCM1077 Extended GPS Code, Phase, CNR and Doppler Measurements
RTCM1087 Extended GLONASS Code, Phase, CNR and Doppler Measurements
RTCM1127 Extended BeiDou Code, Phase, CNR and Doppler Measurements
RTCM0063 BDS Ephemerides (a test message)
This message is a test log of RTCM3.x which contains BDS satellite ephemeris information.
RTCM1006 Station Coordinates Stationary RTK Base Station ARP with Antenna Height
RTCM1019 GPS Ephemerides
RTCM1020 GLONASS Ephemerides
Для сравнения в сообщениях $PSTM проприетарного протокола STMicroelectronics, на основе которых были получены данные постобработки, почти все данные измерений для каждого спутника (Satellite Number, Pseudo range, Satellite tracking Frequency Offset и др.) содержатся в сообщении $PSTMTS. Для каждого спутника формируется отдельное сообщение. Также формируются сообщения $PSTMSBAS — SBAS Satellite Data и ряд других. Работу с сообщениями протокола STMicroelectronics мы рассмотрим далее в разделе, посвященном постобработке.
Данные «сырых» измерений параметров спутников присутствуют и в потоке RTCM3, и в сообщении $PSTMTS, поэтому можно сказать, что мы должны получить сходные результаты при обработке в реальном времени и постобработке на одинаковых приемниках, антеннах и в одинаковых условиях приема. Но при обработке в реальном времени, конечно, все будет выглядеть более наглядно.
Подключаем платы с установленными приемниками к компьютеру, размещаем антенны.
Для получения решения в реальном времени воспользуемся программой RTKNAVI из RTKLib. Запускаем ее и видим примерно то, что показано на рис. 5.
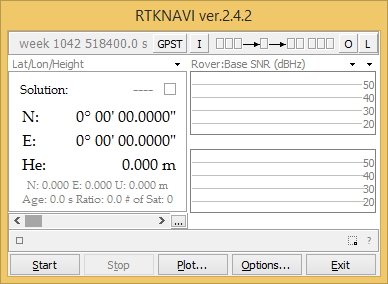
Рис. 5 Главное окно Программы RTKNAVI
Нажимаем кнопку <Options…> в главном окне. Во вкладке Setting1 устанавливаем настройки, как показано на рис. 6.
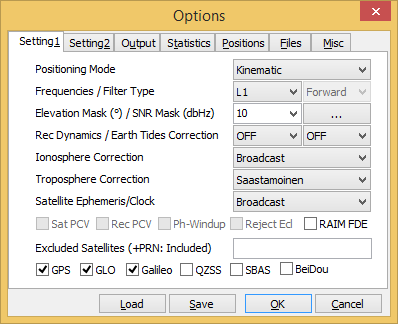
Рис. 6. Настройки на вкладке Setting1
Для упрощения задачи определения координат БС установим автоматическое определение ее позиции RTCM Antenna Position в опциях на вкладке Positions (рис. 7).
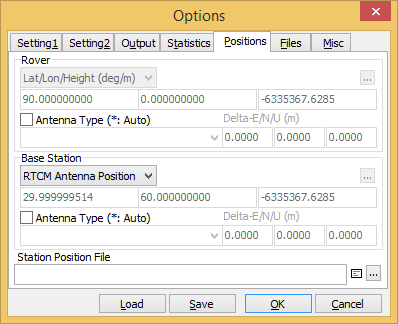
Рис. 7. Настройки на вкладке Positions
Нажимаем <OK>, чтобы запомнить настройки.
Настроим порты для приема потока RTCM3 от БС и ровера, нажав кнопку <I> в главном окне программы (рис. 5).
Кнопки <Opt> открывают окно настройки для каждого порта или другого источника данных (рис. 8).
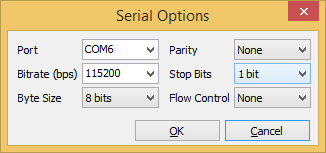
Рис. 8. Окно настроек Serial Options
Нажатие кнопки <Cmd> открывает окно (рис. 9), позволяющее задать последовательность команд для каждого приемника в начале измерений и после их окончания, если это необходимо. Например, так можно настроить приемник на выдачу сообщений RTCM3, а затем отключать выдачу сообщений RTCM3, восстанавливая выдачу потока NMEA0183. Поэтому приемники можно не настраивать в самом начале, а ввести все необходимые конфигурационные команды в этом окне.
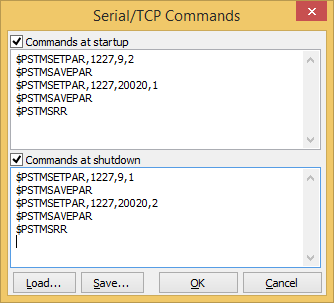
Рис. 9. Окно настроек SerialTCP Commands
Кнопки <O> и <L> в главном окне программы позволяют настроить запись входных данных приемников и выходных потоков программы в файл, передать в физические порты компьютера или на удаленный сервер, если это необходимо. Возможности очень широкие.
После нажатия кнопки <Start> в главном окне программы ожидаем решения навигационной задачи (последовательно позиция должна быть уточнена от SINGLE и FLOAT (рис. 10) до FIX, что соответствует максимальной точности). Соответственно, точность решения будет увеличиваться постепенно, в обычных условиях потребуется не менее 10–15 мин для достижения точности FIX.
Все зависит от условий приема, видимости спутников и типов применяемых антенн.
-
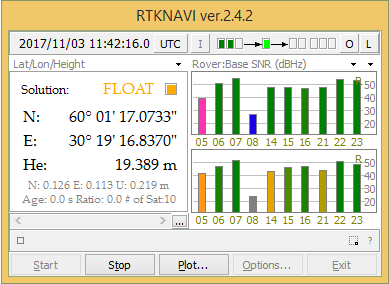
- Рис. 10 Главное окно программы RTKNAVI определение позиции с точностью FLOAT
-
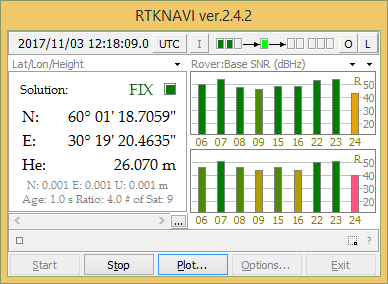
- Рис. 11 Главное окно программы RTKNAVI определение позиции с точностью FIX
Посмотреть результат в виде трека можно, нажав кнопку <Plot> (рис. 11), которая запускает программу RTKPLOT. Данная программа имеет много режимов отображения позиции в виде различных графиков и на картах Google (см. документацию RTKLib).
Возможный вариант решения навигационной задачи в RTKPLOT представлен на рис. 12. Можно оценить среднее соотношение точности для решений SINGLE, FLOAT и FIX; зеленый курсор, показывающий одно из решений FIX, закрывает все поле решений FIX в данном масштабе — точность решений FLOAT и FIX различается в десятки раз.
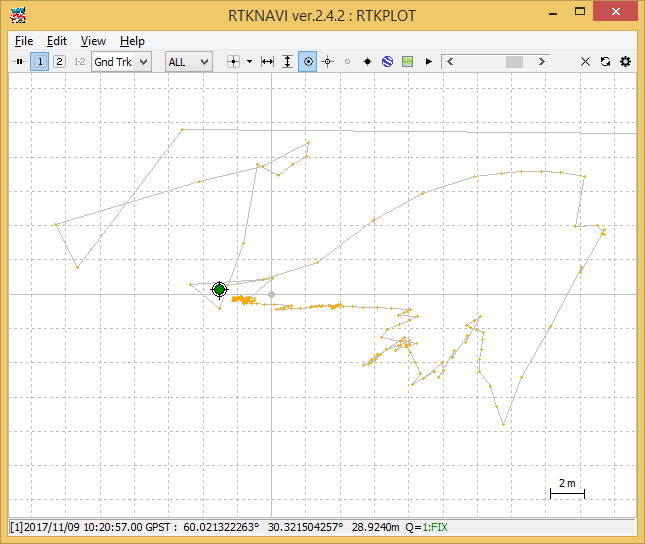
Рис. 12. Определение статической позиции в RTKPLOT
Поле решений FIX в более крупном масштабе показано на рис. 17.
Постобработка
Как уже было сказано выше, данные измерений с учетом фазы сигнала могут быть получены как через проприетарные сообщения $PSTM, которые приемник передает в общем NMEA-потоке и выдача которых включена по умолчанию, но к сожалению, RTKLib пока не поддерживает проприетарный протокол STMicroelectronics, поэтому для конвертирования потока от приемника при постобработке мы будем применять программу rinex_tools, входящую в комплект обновления программного обеспечения STA8089-90_Binary_Image_v4_5_7_CP приемника НАВИА ML8089F вместо RTKCONV. В остальном все так же, как в руководстве к пакету программ RTKLib.
Записываем поток от БС и ровера с помощью программы STRSVR, входящей в состав RTKLib (рис. 13).
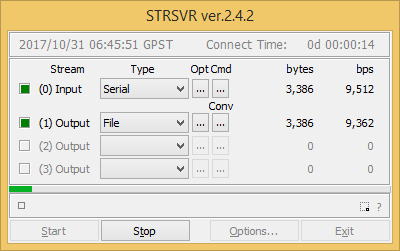
Рис. 13. Главное окно программы STRSVR
В данном случае запись идет из последовательного порта, но возможна запись данных NTRIP из потоков TCP/IP и файлов с серверов HTTP и FTP, кроме того, программа умеет конвертировать различные форматы навигационных файлов в формат RTCM2 и RTCM3.
Запись можно вести на одном компьютере параллельно в двух запущенных экземплярах программы STRSVR, конфликтов не возникает.
Затем с помощью rinex_tools (вместо RTKCONV) конвертируем записанные потоки в формат RINEX (Receiver Independent Exchange Format). Для удобства можно использовать командный файл следующего содержания:
rinex_tools.exe rtk1.bin rtk1
rinex_tools.exe rtk2.bin rtk2
pause
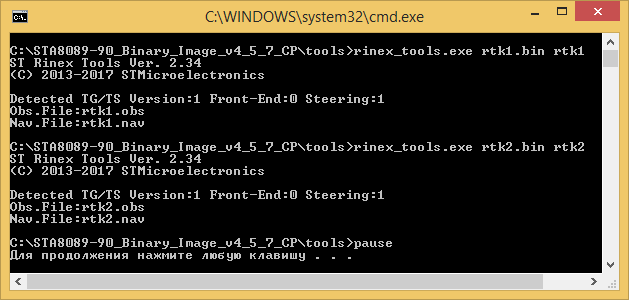
Рис. 14. Результат работы программы rinex_tools
В результате получаем два файла RINEX observation file с расширением .obs (rtk1.obs и rtk2.obs для БС и ровера) и два файла RINEX navigation file с расширением .nav (rtk1.nav и rtk2.nav, рис. 14), с которыми работаем далее.
С помощью программы RTKPOST и файлов .obs для БС и ровера получаем совместное решение навигационной задачи (рис. 15).
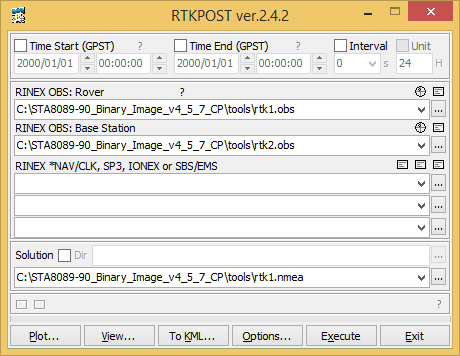
Рис. 15. Главное окно программы RTKPOST
Сначала нажимаем кнопку <Options…>
Настройки на вкладке Setting1 аналогичны установкам при обработке в реальном времени. Устанавливаем режим Kinematic для работы ровера в движении, но если нужно получить просто точные координаты точки, где находится ровер, можно выбирать Static (рис. 6).
Указываем на вкладке Position в окне Option, что координаты БС берем из заголовка файла RINEX (рис. 16).
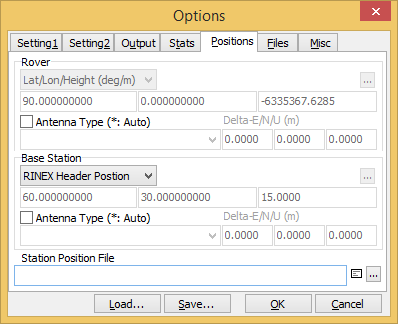
Рис. 16. Настройки на вкладке Positions для RTKPOST
Для преобразования нажимаем кнопку <Execute> (рис. 15).
Нажимаем кнопку <Plot…> в левом нижнем углу окна RTKPOST и смотрим визуализацию трека, сохраненного в файле с расширением .nmea в формате NMEA0183 в открывшемся окне RTKPLOT (рис. 17).
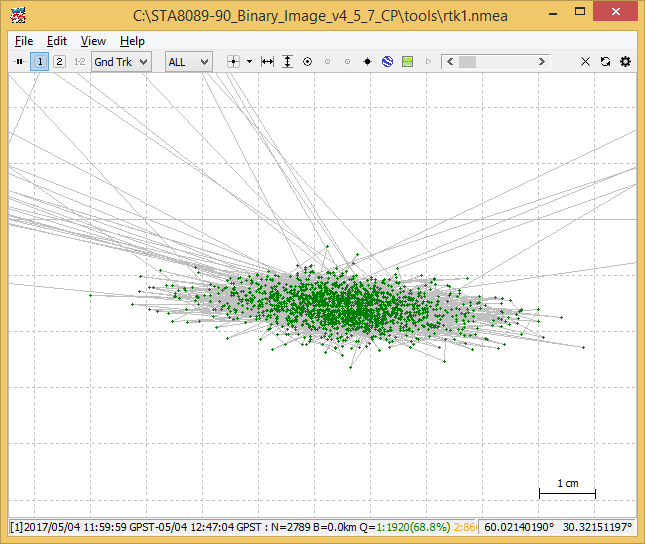
Рис. 17. Визуализация трека постобработки в RTKPLOT
Более подробно по работе с RTK для приемника ML8089F смотри
Зеленые метки — это высокоточные решения позиции ровера с применением данных, полученных от БС, на приведенном фрагменте антенна ровера не перемещалась. Видно, что решение FIX периодически теряется, и получается точность FLOAT, затем решение FIX опять появляется.
Заключение
Приемник НАВИА ML8089F на базе чипсета STA8089 и его последующие версии позволяют повысить точность навигационного решения на основе методов, ранее применявшихся только в геодезических системах, при использовании навигационного оборудования, которое раньше могло применяться лишь для классической маршрутной навигации, повышая точность систем без значительного удорожания и сокращая огромный разрыв в точности получаемого навигационного решения между классическими навигационными и геодезическими системами. Это может обеспечить внедрение решений высокоточной навигации в широкий круг устройств, и прежде всего в обычные трекеры на транспорте, где высокоточная навигация раньше не могла применяться из-за высокой стоимости оборудования. Данное решение не заменяет собой геодезические системы, но сокращает огромный разрыв между точностью геодезических систем и обычных трекеров. С учетом того, что одним из основных направлений, где применяются навигационные модули, является оборудование для транспорта, в дальнейшем мы расскажем о построении мобильного ровера с поддержкой RTK на базе решений STMicroelectronics.
Для написания статьи были использованы сайты
Вестник Электроники, №3-4, 2017, скачать статью
Статьи >> Андрей Русак: «Конкуренты не дают нам расслабляться»
В этом году НАВИА празднует пятилетие. Эта дата кому-то может показаться детской, но за годы, прошедшие с основания, компания достигла многих убедительных успехов. О промежуточных итогах и планах на будущее нашему корреспонденту рассказал Андрей Русак, управляющий директор НАВИА.
 — Коллектив нашей редакции поздравляет НАВИА с пятилетием. Расскажите, с чего все начиналось?
— Коллектив нашей редакции поздравляет НАВИА с пятилетием. Расскажите, с чего все начиналось?
— Представьте, 2010 год, ГЛОНАСС только появился (летало всего три–четыре спутника), но в рамках импортозамещения уже было понятно, что у нас должна быть своя навигационная система, и что у нас может быть что-то российское, независимое от других. И что точность позиционирования значительно улучшится при использовании нескольких систем.
В это время к нам обратилась компания STMicroelectronics— основной производитель чипов GPS и ГЛОНАСС — с предложением о продвижении своего нового чипа. Идея состояла в том, что мы становимся монополистом в техподдержке, нам даются первые квоты и т.д., а мы со своей стороны гарантируем выйти на какой-то объем продаж за счет создания собственного модуля. На практике продвижение чипа оказалось тяжелой задачей, а вот с точки зрения производства модулей — идея полностью удалась.
Среднестатистический заказчик говорит, что не готов тратиться на технологии, даже если мы обучим его персонал, потому что если он спроектирует свою печатную плату в четыре или шесть слоев и поставит чип и другие компоненты, то такая плата будет гораздо дороже стоить, чем двухслойная (для которой достаточно просто купить и установить модуль). В этом есть своя изюминка, если плата не очень сложная.
С другой стороны, у нас есть клиент в Новосибирске, который сам делает модули из наших компонентов. Понятно, что они получаются подороже, чем наши, ввиду малосерийности их производства, но для него это не критично, потому что в рамках всей платы его модуль окупает эти затраты, вся плата становится дешевле.
За пять лет мы создали целую стратегию, отдельное направление, зарегистрировали бренд и торговую марку, подняли сайт, провели большую работу и в итоге смогли занять свою нишу на рынке.
— Почему выбрали такое название — «НАВИА»?
— Вопрос выбора брендового имени всегда непрост. Хотелось найти что-то красивое, с женским именем (представляя красивую молодую девушку), но так, чтобы и с навигацией было связано. И, конечно, раз это товарный знак, он обязательно должен был быть технически регистрируемым. Вот такие задачи я себе поставил в мае 2011 года… Патентная чистота имени была не просто звуком. В интернете я обнаружил сеть отелей «НАВИА» и косметику с таким именем. А однажды, прогуливаясь по солнечной Барселоне, обнаружил кафе «НАВИА». Название было красивое и подходящее!
С брендовым именем связана одна история, которая сейчас кажется смешной, но когда она происходила, мы воспринимали ее очень серьезно. Мы только начинали бизнес, отправили товарный знак «НАВИА» на регистрацию. Эта процедура, вы знаете, длится около года. И конечно, чтобы придать весомости молодому направлению, сразу стали в буклетах писать название НАВИА с символом R (Registered). Не прошло и трех месяцев, как получаем от одного из российских производителей гневное письмо, суть которого сводится к тому, что мы позорим их честное имя, поскольку наше название сходно по написанию, имеет один корень «НАВ» и отличается парой букв от их имени. Они требовали либо убрать регистрационный символ, либо прислать регистрационные документы. Мы тогда очень переживали. Конечно, пришлось убрать буковку R из буклетов и с веб-страницы. Но надо сказать, что время все расставило по местам. Мы и регистрацию получили, и модуль у нас вышел качественный. Думаю, теперь за нас не стыдно, если наш бренд созвучен с конкурентами.
— Какова сегодня структура компании?
— НАВИА — это не отдельная компания, это зарегистрированный торговый бренд. Есть группа коллег–инженеров, под руководством технического директора, из которых один специалист занимается печатными платами, второй — схемотехникой, третий — гарантийным ремонтом и т. д. Изначально задачей этой группы была лишь разработка и производство модулей. На повестке дня было два модуля — «большой» (general) и «микро». Впрочем, это тогда нам казалось, что это «микро», а сейчас у нас есть несколько модулей меньшего размера, но назвать их «нано» язык не поворачивается. В процессе развития мы создали аппаратуру и программное обеспечение для проверки модулей. К настоящему времени нами уже сделано несколько шагов по развитию оборудования: начиная от простых стендов на 20 модулей до оборудования промышленных масштабов.
В какой-то момент наша группа перестала справляться с управлением производственными процессами, и было принято решение о передаче управления выпуском в нашу холдинговую структуру, занимающуюся контрактным производством — PT Technology. Это позволило сосредоточиться на генерации новых идей и продуктах, избавившись от «головной боли» по их выпуску, за что отдельная благодарность директору этого подразделения, Eлене Соколовской.
— Оказывает ли НАВИА поддержку в применении модулей и чипсетов в конечных устройствах?
— Да, конечно. У нас на сайте существует горячая линия. Письма, которые приходят от клиентов, попадают в службу конечной поддержки и распределяются по инженерам. Уместно сказать и о дистрибуции («ЕвроМобайл», «Компэл», «Радиотерминал»).
Мы проводим такую политику, что у дистрибьютора тоже должны быть свои инженеры, способные осуществлять техническую поддержку. Для этого они у нас проходят обучение, это их непременная обязанность.
— Какие направления работы вы особо выделяете?
— С одним из своих заказчиков мы сейчас запускаем проект «ЭРА–ГЛОНАСС» уже с применением не модулей, а навигационных чипов Teseo-III производства STMicroelectronics. Заказ большой, предполагается выпускать по 300 тыс. шт. в год. Применение решения на чипе позволит заказчику сэкономить, в том числе на программном обеспечении и ресурсах. Потому что, применяя чип, можно получить не только функции определения местоположения, но и возможность использования внутренних ресурсов процессора для управления всем устройством. Таким образом, центральный контроллер исключается, и на этом экономится пара евро. Еще у нас есть проект по грузовикам, где мы тоже пытаемся внедрить чиповые решения. И, конечно, кроме производства навигационных модулей мы еще занимаемся производством Bluetooth-модулей — это тоже было предложение STMicroelectronics. Сейчас мы работаем уже не только с STMicroelectronics, но и с другими производителями чипов, например, MediaTek. Это связано с тем, что везде свои требования: если нужно быстродействие и особо точное позиционирование, мы выбираем STM, а если требуется низкое энергопотребление, то — MediaTek. Это диктует заказчик, мы рыночно ориентированная компания.
— Как вы думаете, благодаря чему за такой короткий срок вы достигли таких значительных результатов?
— Я думаю, нам на руку сыграло сразу несколько моментов.
 Во-первых, у нас уже было понимание рынка, мы знали, куда продавать подобные изделия.
Во-первых, у нас уже было понимание рынка, мы знали, куда продавать подобные изделия.
Во-вторых, был опыт разработки, производства и реализации собственных достаточно сложных изделий в компании «Новаком».
В-третьих, необходимо учитывать просто-таки громадную компетенцию STMicroelectronics в навигации… Компания производит навигационные чипы миллионами штук, начиная с 90-х годов; программное обеспечение GPS/ГЛОНАСС тестируется ведущими производителями навигационной аппаратуры и конечными потребителями — крупнейшими автогигантами мира. Выбираются различные реальные условия для тестов: «городские каньоны» в Токио или условия крайних, заполярных широт, где GPS принимается хуже, а ГЛОНАСС имеет полное покрытие. Поэтому, когда мы свои первые модули принесли одному из придирчивых клиентов, вопросы из разряда «а вы тестировали ваше ПО под линиями электропередач?» выглядели несерьезно. Конечно, тестировали! Весь мир, можно сказать, этим занимается! Применительно к STMicroelectronics сказанную выше фразу «громадная компетенция» можно трактовать еще и по-другому: это возможность изготовить моментально «громадное количество» микросхем ГЛОНАСС! Понимаете, о чем я говорю? Не нужно ждать, например, 30 недель… А оперативность в нашем деле — главный козырь!
В-четвертых, у нас под руководством Осадчего В. В. работают квалифицированные кадры. Они наша особая гордость: кажется, что на сегодня по технике для них нет неразрешимых задач.
И последнее. Осознавая всю глобальность задачи, уже на первом этапе работы мы инвестировали немалые средства в собственное лабораторное оборудование: симуляторы GPS/ГЛОНАСС, рекордеры навигационного сигнала и другое оборудование, так необходимое для ведения независимых исследований и разработок. Сейчас, имея парк передовой техники, мы можем приглашать клиентов протестировать свои навигационные устройства, оказываем необходимую помощь в разработке. Это уже другой «статус».
В общем, все согласно классического дерева целей: «деньги, клиенты, маркетинг, процессы и люди».
Надо сказать, уникальность проекта НАВИА еще в том, что он сделан не на государственные деньги, как это сейчас модно, а на частные — деньги нашей компании PT Electronics! Я сам писал бизнес-план и защищал его перед нашим советом директоров, т.к. деньги требовались немалые. Здесь надо сказать спасибо президенту компании Шумилину Ю. В. — он их выделил вовремя и в полном объеме, поверил в нас и… получилось!
Нам помогло также то, что мы сразу все делали параллельно: разрабатывали модули, к ним — тестовое оборудование, оформляли регистрацию товарного знака, строили рекламную политику, подключали интернет-ресурсы, занимались продвижением, патентовали полезную модель, заключали договора с дистрибуторами и т.п. Тут, как никогда, мы поняли важность процессного подхода. Если придумал устройство, то прежде, чем его продвигать, придумай устройство для его массового тестирования, придумай схему продаж, рекламную политику, объясни самому себе, почему он так нужен твоему заказчику, одновременно сделай удобные демокиты и т.п.!
— А конкуренты?
— Конкуренты не дают нам расслабляться. Когда в 2010–2011 гг. ГЛОНАСС только поднимал голову, на рынке было всего несколько компаний, предлагающих конечное оборудование пользователя. Цены тогда исчислялись сотнями долларов, а мы чувствовали себя королями: у нас модуль можно было купить за $20. Кроме того, у нас уже был опыт по созданию устройств для «беспроводки» — и с компанией «Новаком», и с «ЕвроМобайл». Я помню, в самом начале деятельности НАВИА один из известных китайских производителей навигационных модулей решил повторить наш подвиг — выпустить аналогичный модуль на том же чипе STMicroelectronics… С тех пор некоторые компании пытаются периодически выпускать свои модули в «нашем» форм-факторе.
— И как вы спасаетесь…?
— Мы их количеством забили… Просто расстреливали своими модулями из пулемета, вставляя их в ленты! (смеется) На самом деле, еще не начав выпускать эту продукцию, мы уже предполагали, какой будет подход у конкурентов, особенно из братской КНР — конечно, задавить ценой. Поэтому мы, прежде чем объявить громогласно о своих творческих успехах в рождении первого миниатюрного ГЛОНАСС-моду-ля made in Russia, обстоятельно подготовились к выпуску не 1000 и не 10 000 шт., а сразу 100 000 модулей! И это сработало. Конечно, мы рисковали, не без этого. Но у нас были свои ключевые клиенты, готовые у нас покупать и, конечно, наш партнер — «ЕвроМобайл» — со своей клиентской сетью оказал просто-таки колоссальную помощь в продажах и продвижении бренда НАВИА. Отдельная им благодарность за это! Получилось, что мы первые выступили с таким количеством, мы и лучшую квоту получили на чип от STM. А мы знаем, что если однажды получил хорошую цену, то каждый год будешь получать скидку… Ясно, что вновь включившимся в игру соперникам уже такого не достичь никогда.
— То есть все так просто?
— Есть еще секретный принцип (хотя никакой это не секрет): если производишь примерно 200 тыс. модулей в год для минимум 40 клиентов, ты конкурентоспособен. Нельзя 100% бизнеса строить на двух заказчиках — отберут!
 Ну и, конечно же, мы постоянно придумываем что-то новое, чтобы быть первыми. В этом мне активно помогает руководитель нашего отдела беспроводных технологий Танцюра Алексей. Для того чтобы было понятнее, что мы продаем, он даже сделал функциональную схему самого массового навигационного устройства типа «трекер» в виде отдельных электронных компонентов, наклеенных на кусок пластика и соединенных рисованными линиями — связями с их описанием. Он же отвечает мне на главный вопрос — сколько модулей производить.
Ну и, конечно же, мы постоянно придумываем что-то новое, чтобы быть первыми. В этом мне активно помогает руководитель нашего отдела беспроводных технологий Танцюра Алексей. Для того чтобы было понятнее, что мы продаем, он даже сделал функциональную схему самого массового навигационного устройства типа «трекер» в виде отдельных электронных компонентов, наклеенных на кусок пластика и соединенных рисованными линиями — связями с их описанием. Он же отвечает мне на главный вопрос — сколько модулей производить.
Когда ты приходишь к клиенту не просто с диодом, процессором, а с изделием — модемом или модулем, на котором держится уже концепция всего устройства, то твой авторитет в его глазах резко растет. И потом, производя модули, ГЛОНАСС или GPS, ты имеешь на рынке преимущество, входишь число лидеров.
Надо периодически ставить себя на место заказчика! Надо любить своих клиентов, понимать их тревоги. Я, как правило, раз в две недели своих людей собираю и провожу некий тренинг–игру: они мне должны доказать, почему я у них буду покупать те или иные новые продукты! После такой беседы как-то легче и понятнее все становится, отсекается все ненужное.
Важно не забыть за своими непомерными амбициями и эгоизмом то, что мы продукцию делаем не для себя лично, а для простых людей, которым, в общем-то, безразлично, какие мы крутые! У них свои заботы, и все, что от нас требуется — качественный и конкурентоспособный товар, красивое схемотехническое решение, сделанное с душой. Чтобы их продукция была конкурентоспособна на рынке, чтобы ее у них покупали, тогда у них будет потребность в наших компонентах. Все просто! Кстати, примерно так читался предыдущий девиз и бизнес-стратегия нашего холдинга.
— Кого вы могли бы назвать в качестве основных конкурентов в России и за рубежом?
— Если говорить о российских компаниях, то они занимают сейчас какую-то свою нишу, сосредоточившись, в основном, на военных заказах и импортозамещении. Мы занимаемся больше коммерческими и автомобильными проектами, а это другой рынок. Можно сказать, что в некоторой степени мы конкурируем сейчас с компанией u-blox, но ситуация такая: когда мы внедряем чипы STMicroelectronics, то ощущаем за собой мощь этого гиганта, а это то, о чем я уже говорил: количество с большой буквы Q и, конечно же, это существенное подспорье по ценам и техническим возможностям.
— Как согласуется производство чипов с трендом на импортозамещение?
— С импортозамещением интересный момент, ведь в России навигационные чипы не производятся. Чаще всего они заказываются и изготавливаются в Тайване, несмотря на то что разработка — наша, отечественная. Но не все так однозначно. Например, непременным условием одного из наших клиентов была передача ему программного обеспечения модуля в исходных кодах. Таким образом, все перемешалось, потому что программное обеспечение перешло в наши в руки.
Существуют и отечественные производители. У «Прогресса», например, есть свой чип. Если они нам предложат какую-нибудь разработку, которая будет конкурентоспособна по цене, мы будем использовать их продукцию в своих модулях. Мы с ними уже сотрудничаем по ряду устройств. Если будет предложена продукция, соответствующая мировым ценам, мы будем первыми в очереди.
— Расскажите, в каких сферах применяются ваши навигационные модули и есть ли планы по освоению новых областей?
— Наше поле — автомобилестроение, медицина, мониторинг объектов недвижимости, а также персональные трекеры, охрана.
Сейчас мы активно занимаемся развитием медицинского направления. Оно уже существует: клиенты, которые должны находиться под постоянным наблюдением врача, носят устройства мониторинга, которые либо накапливают информацию, либо передают ее в режиме реального времени. К примеру, холтеровское мониторирование только накапливает информацию. Но если говорить о пациентах в группе риска, то используемые ими устройства снабжены модемом для обмена данными с call-центром. В этом случае важность позиционирования такого объекта необходима, продиктована жизнью: если человеку плохо, вероятно, что он не сможет объяснить, где находится, поэтому проще сразу определить его геогра-фические координаты. В свое время Siemens производила такие блоки. Но в нашей стране запуск производства таких носимых устройств станет важным шагом. И это только одна из областей применения беспроводных решений в медицине.
— Есть ли у вас зарубежные заказчики? Развивается ли экспортное направление?
— С 2012–2013 гг. мы вплотную занимаемся международным бизнесом. У нас уже были подписаны договоры, например в Германии. Проблема в том, что на сегодня, если взять, допустим, автомобили, то там производители сразу покупают чипы.
А если говорить о пласте компаний, которые производят устройства мониторинга (трекеры), то они, в основном, позиционируют их как устройства противодействия угону. Но в Европе машины не угоняют, там люди просто запирают их на ключ.
Есть еще страны третьего мира — например ЮАР, Бразилия, где криминогенная обстановка повышена, поэтому такие устройства востребованы. Мы сейчас пытаемся продвинуться в сторону Бразилии, в ЮАР тоже кое-какие контакты получили.
Поскольку ГЛОНАСС/GPS-модули могут применяться не только для позиционирования объектов, но и для получения метки единого времени с точностью до 15 нс, в Европу нам удавалось продавать по 100–200 шт. модулей, которые шли на организацию базовых станций.
— А у нового медицинского направления есть перспективы выхода на зарубежный рынок?
— Безусловно, есть. У нас даже были контакты с одной португальской компанией. Партнерство не сложилось, но будем предпринимать попытки и дальше. И будем выходить на рынки с уже готовой продукцией. К концу 2017 г. мы планируем создать готовое устройство.
— Что нам ждать в ближайшее время от НАВИА?
— Мы постоянно генерируем новые идеи, увеличиваем линейку модулей. Если нужен самый дешевый, малофункциональный модуль, но при этом на уровне конкурентов, мы его делаем. Мы пытаемся идти в ногу с рынком, то есть со временем. За прошлый год мы произвели феноменальное количество модулей, около 700 тыс., такой объем требовался для топографии. В этом году планы поскромнее, а в следующем мы опять ожидаем прорыв.
Вестник Электроники, №3, 2016
Статьи >> ML8090 продолжает славные традиции ML8088
В статье описан самый мощный современный модуль ML8090 (семейство TESEO III) для определения настоящего местоположения объекта и предсказания его положения в будущем (Dead Reckoning).
 В настоящее время система определения местоположения по спутникам используется буквально везде, разве что исключая интеллектуальные пылесосы и холодильники. Возможно, я несколько преувеличиваю… Хотя и там, и там знание точного положения в пространстве было бы совсем не лишним. Скажем, для интеллектуального холодильника знание положения в пространстве может сократить число телодвижений пользователя, а заказ продуктов может содержать автоматически определенный адрес. По положению в пространстве и карте города вполне можно определить местонахождение устройства. Конечно, для этого точность определения координат должна составлять не более метра, а лучше – несколько сантиметров. Иначе как определить, в какой именно кухне установлен искомый холодильник? Типовая планировка квартир такова, что кухни соседей разделены одной стеной, холодильники стоят «спина к спине» и различаются по положению максимум на метр.
В настоящее время система определения местоположения по спутникам используется буквально везде, разве что исключая интеллектуальные пылесосы и холодильники. Возможно, я несколько преувеличиваю… Хотя и там, и там знание точного положения в пространстве было бы совсем не лишним. Скажем, для интеллектуального холодильника знание положения в пространстве может сократить число телодвижений пользователя, а заказ продуктов может содержать автоматически определенный адрес. По положению в пространстве и карте города вполне можно определить местонахождение устройства. Конечно, для этого точность определения координат должна составлять не более метра, а лучше – несколько сантиметров. Иначе как определить, в какой именно кухне установлен искомый холодильник? Типовая планировка квартир такова, что кухни соседей разделены одной стеной, холодильники стоят «спина к спине» и различаются по положению максимум на метр.
Для интеллектуального пылесоса знание текущих координат с точностью до сантиметров вполне может дать ему новое качество. На сегодня алгоритм движения такого устройства основан на случайном столкновении с препятствиями. Самые продвинутые модели могут использовать сигналы от барьеров и не заходить за них. Если бы программа управления движением пылесоса могла опираться на точные координаты с точностью до сантиметров, можно было бы составить задание прибору, просто очертив на плане квартиры зоны, где надо убирать, а где не надо.
Фантастика? Пока да, но средства измерения положения в пространстве быстро развиваются.
Навигационные системы
В настоящий момент мы имеем точность определения координат порядка единиц метров, но технически можно увеличить точность до единиц сантиметров. Это если говорить о массовой продукции, а системы спецприменения уже сегодня обеспечивают такую точность, например геодезические приемники, которые используют для установления координат на местности для определения границ земельных участков.
Как известно, на сегодня полностью развернуты две спутниковые системы определения координат – отечественный ГЛОНАСС и американский GPS. Оба имеют полноценную спутниковую группировку и запасные спутники. На подходе:
- европейская система Galileo (на текущий момент четыре спутника, полное развертывание запланировано на 2018 г.);
- китайская система BeiDou2 (на текущий момент 15 спутников, полное развертывание к 2020 г.);
- японская система QZSS (на сегодня один спутник дифференциальной коррекции, до 2017 г. должно быть выведено на орбиту еще три спутника, а после 2018 г. – остальные). Эта система, скорее, является дополнением к GPS и имеет главной целью увеличить точность измерения координат (до сантиметров) на территории Японии.
Модуль ML8090
Компания НАВИА подготовила к выпуску новейший модуль ML8090, построенный на новейшем навигационном чипсете семейства Teseo III (STA8090FG) от STMicroelectronics. Модуль способен одновременно следить за 48 спутниками любой из навигационных систем ГЛОНАСС/GPS/Galileo/BeiDou/QZSS. В семейство TESEO III, объединяющее все необходимое для построения систем определения положения, входят несколько модулей третьего поколения для разных условий работы, а также программное обеспечение (ПО) DRAW для расчета предсказания положения объекта. DRAW расшифровывается как Dead Reckoning Automotive Way и может быть переведено как «Предсказание движения автомобиля».
Основные характеристики устройства:
- 48 каналов для одновременного слежения за спутниками любой системы GNSS и два канала быстрого определения положения; однокристальное решение: на одной подложке размещены малошумящий усилитель и высокочастотные узлы;
- чувствительность –162 дБм внутри помещения в режиме захвата;
- время захвата (TTFF) менее 1 с при горячем старте и 30 с при холодном;
- высокопроизводительное микропроцессорное ядро ARM946 (тактовая частота до 196 МГц);
- 256 кбайт статического ОЗУ;
- встроенная SQI flash-память объемом 16 Mбайт;
- часы реального времени;
- 32-битный сторожевой таймер;
- три последовательных интерфейса;
- интерфейс I2C, способный работать в режиме Master и Slave и позволяющий подключить интегрированный датчик ускорения и твердотельный гироскоп для получения данных для расчетов траектории в режиме Dead Reckoning;
- синхронный последовательный интерфейс (SSP, поддерживается режим Motorola-SPI);
- USB 2.0 Full speed с интегрированным приемопередатчиком;
- два контроллера CAN-шины, позволяющие подключение для считывания текущих значений скорости/пробега автомобиля и т. д.;
- двухканальный АЦП;
- встроенный импульсный модуль управления питанием;
- условия эксплуатации:
— o основной (Vinl) и резервный (Vinb) источники пита-ния 1,6–4,3 В;
— o питание цифровой части (Vdd) 1,2 В ±10%;
— o питание высокочастотных узлов (Vcc) 1,2 В ±10%;
— o питание цепей ввода/вывода (Vddio) 1,8 В ±5% или 3,3 В ±10%;
- корпус TFBGA99 (5x6x1,2 мм), 0,5 мм шаг выводов;
- диапазон рабочих температур –40…+85 °C.
Структура и возможности модуля
STA8090FG представляет собой однокристальный модуль, способный одновременно работать со всеми системами спутниковой навигации (GPS/ГЛОНАСС/Galileo/BeiDou/QZSS). В производственной гамме имеются также изделия Automotive grade, пригодные для использования в бортовой автомобильной технике. Блок-схема модуля показана на рис. 1.
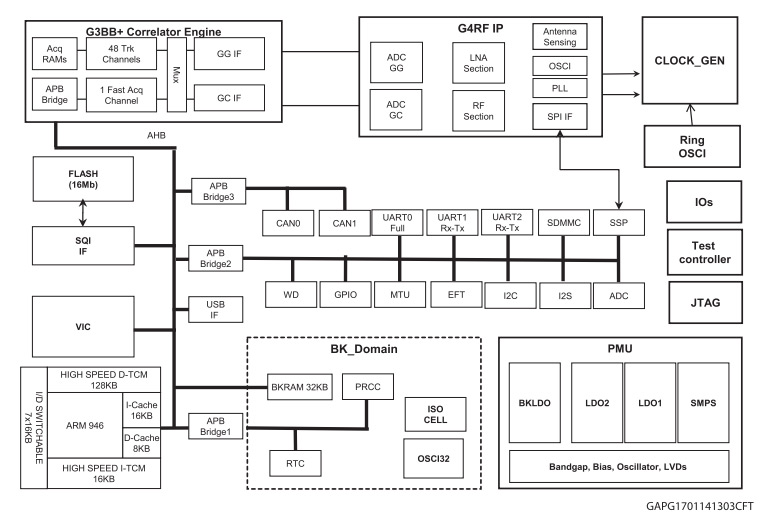
Рис. 1. Блок-схема STA8090FG
Способность STA8090FG использовать одновременно множество сигналов от всех систем GNSS, независимо от их принадлежности к разным системам, позволяет ему рассчитывать данные позиционирования с высочайшей точностью. Кристалл отлично работает в тяжелых условиях современных городов с высокоэтажной застройкой и в условиях, когда захват и слежение за спутниками сильно затруднены наличием строений и другими препятствиями. Требуется лишь минимальное количество вспомогательных элементов (обвязка) STA8090FG для получения полностью законченного изделия с весьма конкурентной ценой. Малое место, необходимое для размещения STA8090FG в готовом устройстве, делает этот кристалл подходящим для использования в портативных трекерах, разнообразных устройствах телематики, планшетах и смартфонах, морских и спортивных устройствах.
Энергоэффективность
STA8090FG отличают продвинутые средства управления энергопотреблением. Основные интерфейсы UART и SPI работают с уровнем сигнала 1,8 или 3,3 В (по выбору пользователя), а питание модуля может быть в диапазоне 1,8–4,3 В. Это позволяет использовать совместно с модулем современные процессоры, непосредственно подключая модуль к шинам данных. Устройства сопряжения не требуются. Границы напряжения питания позволяют использовать литиевые аккумуляторы непосредственно без дополнительных стабилизаторов.
STA8090FG поставляется полностью укомплектованным матобеспечением, которое выполняет все расчеты по позиционированию, включая слежение, захват, навигацию и вы-вод данных. При этом никакая дополнительная память не требуется, т. е. в кристалле есть все, что нужно.
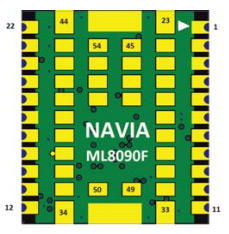
Рис. 2. Примерное расположение выводов на нижней поверхности ML8090
Точность определения координат модуля ML8090 в инженерных образцах на сегодня составляет 2 м по уровню 0,5 при использовании альфа-версии встроенного ПО. Это означает, что при статистической обработке большого количества отсчетов (5–10 тыс.) 50% точек попадают внутрь окружности диаметром 2 м. По мере доработки математического обеспечения точность вырастет минимум втрое и составит 1 м – 60 см. Конечный потребитель, естественно, получит доработанное ПО. Также в кристалле заложена возможность выполнять определение координат с использованием фазовых методов, что даст увеличение точности до 50 см.
В кристалл интегрированы часы реального времени и цепи их поддержки от резервной батареи.
Максимальная частота выдачи координат составляет 10 Гц. Это программное ограничение, поскольку описываемое изделие предназначено для гражданского применения.
Для инженеров-разработчиков предоставляется SDK для пользователя, а большие свободные ресурсы для приложения пользователя позволяют решать сложные задачи. Например, используя SDK, можно дописать собственную программу и в готовом приборе полностью исключить внешний процессор, всю логику работы готового изделия обеспечить внутренними, уже имеющимися ресурсами STA8090FG. SDK поставляется по запросу пользователя бесплатно, но потребуется подписать NDA.
Также следует отметить традиционно качественную защиту антенного входа от электростатики: до 8 кВ воздушного разряда гарантируется официально, фактически – до 15 кВ. 15 кВ – это пробивной промежуток порядка 4 мм в воздухе.
Новый модуль ML8090 будет доступен в почти таком же корпусе, как и ML8088. Боковые выводы останутся теми же, дополнительные выводы появятся на нижней поверхности модуля (рис. 2). Поначалу цена нового устройства будет несколько выше, чем ML8088, но по мере освоения производства и наращивания выпуска предполагается достичь такой же стоимости изделия, как сейчас у ML8088. Распределение сигналов по выводам ML8090 приведено в таблице 1.
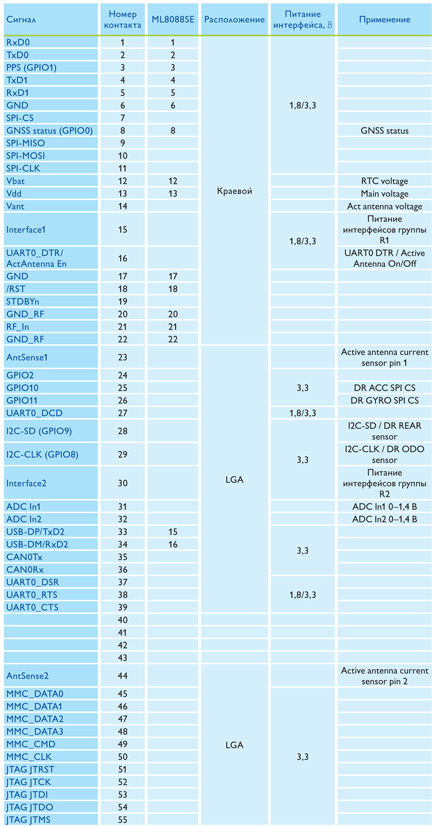
Таблица 1. Распределение сигналов по выводам ML8090
Краевой вывод 15 (рис. 2) служит для подачи питания (1,8 или 3,3 В) интерфейсов группы R1 (краевые контакты). Питание нижних интерфейсов (3,3 В) заведено на вывод 30. Сигнал Standby (вывод 19) и сигнал WakeUp всегда работают с уровнем 1 В. Группа контактов JTAG предназначена для отладки ПО.
На момент написания статьи производитель еще не представил окончательную разводку выводов. Наиболее вероятно, что выводы внешнего (1–22) и первого внутреннего (23–44) рядов останутся неизменными, а назначение выводов «внутренней десятки» (45–54) может измениться. Впрочем, работа идет быстро, и я уверен, что к моменту публикации этой статьи модуль будет окончательно разведен и готов к промышленному выпуску.
Сценарии использования режима предсказания для STA8090FG
В качестве примера возьмем обычный автомобиль. Система позиционирования на базе STA8090FG будет получать данные от систем спутниковой навигации от антенны, показания трехосевого твердотельного датчика ускорения (MEMS Accelerometer), трехосевого твердотельного гироскопа (MEMS Gyroscope) и данных о перемещении автомобиля, доступных по CAN-шине (рис. 3).
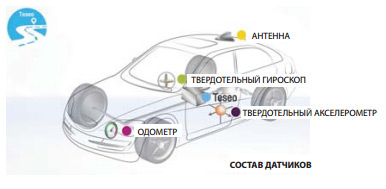
Рис. 3. Состав датчиков для системы предсказания положения
Пока автомобиль движется по местности без помех приему сигналов спутников (режим «чистого неба», рис. 4), STA8090FG использует данные для расчета положения и калибровки вспомогательных датчиков.
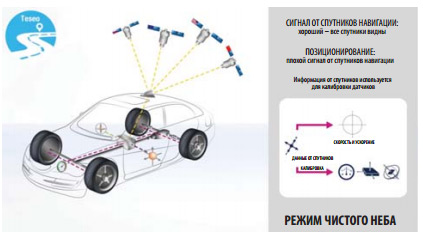
Рис. 4. Движение автомобиля в режиме «открытого неба»
Если автомобиль движется по городу с высокими зданиями, то прием сигналов спутников затруднен (рис. 5). В этом случае STA8090FG дополняет данные по положению от спутников данными от гироскопа, акселерометра и одометра. Для сведения данных от датчиков используется встроенное ПО DRAW.
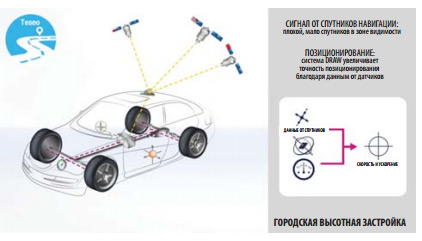
Рис. 5. Движение автомобиля в режиме застройки города высотными зданиями
Третий вариант – движение по многоуровневой развязке (рис. 6). В этом случае важно знать не только плоскостные координаты, но и высоту. Программа DRAW использует весь комплекс данных, включая данные от трехкоординатного твердотельного акселерометра, что позволяет значительно точнее определять положение автомобиля на развязке, а именно – на каком из лепестков развязки находится в данный момент автомобиль.
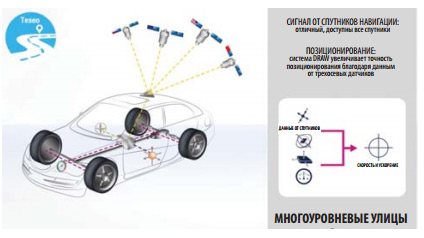
Рис. 6. Движение автомобиля на многоуровневой развязке
И наконец, самый сложный вариант – подземный многоуровневый паркинг или протяженный туннель (рис. 7). В этом случае сигналы спутников отсутствуют полностью, но система DRAW, используя информацию от трехосевых твердотельных акселерометра и гироскопа, а также от одометра, продолжает выдавать информацию о положении автомобиля с высокой точностью.
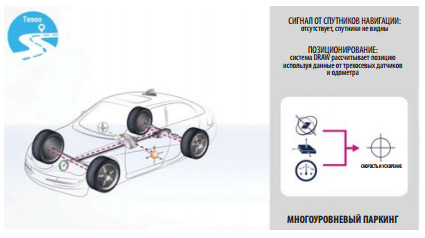
Рис. 7. Движение автомобиля на многоуровневом паркинге
Преимущества многосистемного навигационного приемника
Поскольку на текущий момент полностью развернуты всего две полноценные спутниковые навигационные системы (отечественный ГЛОНАСС и американская GPS), рассмотрим преимущества совместного их использования. К ним относятся:
- минимизация времени первоначального определения местоположения;
- минимизация дисперсии расчета координат;
- возможность отбора наилучших измерений;
- фильтрация случайных отклонений;
- сохранение полной работоспособности в случае отказа одной из систем.
На рис. 8 показано сравнение возможностей только одной системы и двух систем одновременно. Использование двух систем одновременно значительно улучшает работу системы GNSS. Так, например, вдвое уменьшается разброс координат и вдвое увеличивается точность их определения.

Рис. 8. Сравнение возможностей одной и более одной системы GNSS
При использовании ПО предсказания очень важно обеспечить максимальное количество и точность дополнительных данных, включая температуру. Показания твердотельных акселерометров и гироскопов достаточно сильно зависят от температуры. Если обеспечить ПО DRAW даннымив том числе и от температурных датчиков, то после выполнения калибровки точность расчетов положения значительно увеличится.
Увеличение точности при работе ПО предсказания движения DRAW можно проиллюстрировать такими данными: при движении в течение 10 мин в туннеле Namsan (Сеул) пройден путь в 1500 м. Температура в туннеле изменилась на 5°. Ошибка составила 40 м (2% от пройденного пути) с учетом ухода данных твердотельного акселерометра и гироскопа, а без такой температурной коррекции – 430 м (28% от пройденного пути).
ПО DRAW поставляется по запросу.
Заключение
В статье рассмотрен новый модуль ML8090, производящийся на базе последнего, самого современного однокристального устройства STA8090FG.
Ключевые особенности ML8090:
- пять систем навигации – GPS/Galileo/Glonass/BeiDou/QZSS;
- ARM946 MCU;
- повышенная точность определения координат (потенциально до 50 см);
- два интерфейса UART, один USB/UART, один I2C, один SPI, один MMC, CAN;
- выбираемое пользователем напряжение работы интерфейсов (1,8 или 3,3 В);
- ПО DRAW для предсказания положения (Dead Reckoning Automotive Way);
- широкий выбор внешних датчиков, настройка внешних датчиков в установках программы;
- автокалибровка датчиков в процессе работы, компенсация температурных дрейфов, автоподстройка показаний датчиков гироскопа/ускорения под реальное положение после монтажа (не требуется ни точной установки, ни калибровки);
- SDK для собственных приложений клиента.
Сергей Дронский
Вестник Электроники, №4, 2014, скачать статью
Статьи >> Навиа вчера, сегодня и завтра
Команда НАВИА специализируется на разработке и производстве изделий в области беспроводной связи. В этом году специалистами НАВИА были разработаны навигационный модуль (подробнее о нем можно прочитать в статье Сергея Дронского «ML8090 продолжает славные традиции ML8088») и модуль Bluetooth LE на основе новейших чипов от STMicroelectronics. Рассказать о компании и новинке мы попросили Владимира Осадчего, руководителя команды разработчиков НАВИА.
 Расскажите о фирме НАВИА. С чего начинался этот проект?
Расскажите о фирме НАВИА. С чего начинался этот проект?
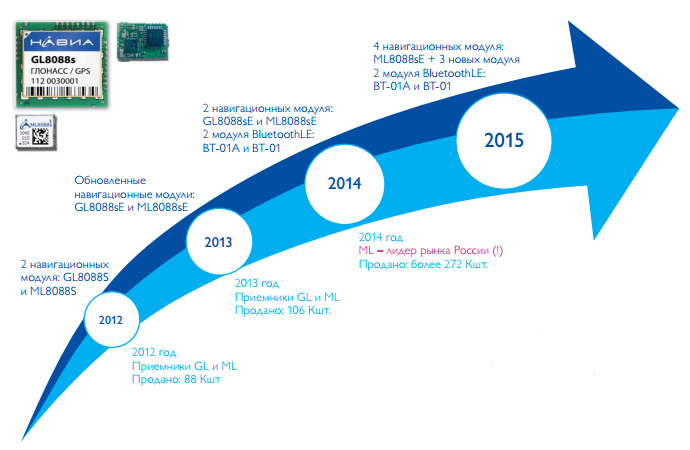
Направление было создано в начале 2011 г., и вскоре мы уже имели рабочие прототипы модулей GL8088s, а к концу лета – прототипы модулей ML808s. К ноябрю мы подготовили производственное технологическое оборудование для модулей GL8088s, что позволило нам выпустить в декабре первые серийные экземпляры. Отмечу, что мы были первыми в мире, кто выпустил серийные модули на чипсете STA8088FG.
В феврале 2012 г. мы выпустили первые предсерийные образцы модуля ML8088s, опять-таки став первыми в мире, кто выпустил самый маленький на тот момент GPS/ГЛОНАСС-модуль с краевыми SMD-контактами. Для российских производств этот модуль стал настоящим вызовом, заставившим несколько предприятий заметно пересмотреть свой технологический процесс.
Где производится продукция под маркой НАВИА?
Мы прошли достаточно большой путь в выборе партнеров по выпуску нашей продукции. Начали производство модулей на одном из предприятий Санкт-Петербурга, потом перенесли часть линейки в Подмосковье (Зеленоград). Выпускали модули там достаточно долго, однако мы продолжали искать и других партнеров. Протестировали еще несколько производств, кто-то подошел, кто-то не смог выпустить продукцию с надлежащим качеством. Одновременно искали производство в Юго-Восточной Азии, поскольку значительная часть наших клиентов собирает свои конечные изделия именно там. С точки зрения логистики получается, что «плечо» ЮВА–ЮВА короче, а это выгодно и нам, и нашим клиентам. Таким образом, сегодня у нас несколько площадок для сборки модулей. Мы направляем продукцию по кратчайшему маршруту к нашему покупателю.
Какие разработки НАВИА вы хотели бы подчеркнуть особо?
Традиционно мы занимаемся навигационными модулями и всем тем, что может потребоваться нашим клиентам, чтобы эти модули применять: программное обеспечение, демонстрационные платы, анализ устройств пользователя и многое другое. Поскольку стандартные недорогие покупные антенны не реализуют точностный потенциал наших модулей, нам пришлось разработать свою антенну. Таким образом, из разработок навигационных модулей плавно выкристаллизовалось дополнительное направление – антенны. Еще одно новое направление нашей деятельности – разработка Bluetooth LE модулей. Мы разработали бюджетную версию модуля, максимально простого в применении, и, соответственно, делаем для него и всю «инфраструктуру» – демонстрационную плату, встроенное программное обеспечение, программное обеспечение для работы с демонстрационной платой, технологическое программное обеспечение для серийного выпуска…
 Расскажите об истории появления нового модуля.
Расскажите об истории появления нового модуля.
Как я уже говорил, первоначально мы ориентировались только на разработку навигационных модулей на базе чипсетов STMicroelectronics (ST). Так на этом чипсете мы разработали два модуля со сходной функциональностью, отличающихся размерами и, соответственно, расположением выводов. Модули неоднократно модернизировались с целью улучшения потребительских качеств и технологичности (для информации – нынешняя версия печатной платы модуля имеет номер 8).
Развитие навигационных приемников не останавливается ни на день, разрабатываются новые технические решения, вводятся в строй давно ожидаемые спутниковые группировки – европейский «Галилео» и китайский «БейДоу» («Компас»). Все это стимулирует производителей микросхем разрабатывать новые чипсеты для спутниковых приемников. Вот мы и освоили новый для себя чипсет МТ3333 производства тайваньской компании «Медиатек». Модуль на нем был выполнен в форм-факторе нашего традиционного ML8088sE и практически pin-to-pin совместимым. Были получены положительные результаты, выпущена малая партия модулей (порядка 40 шт.). Клиентам модуль понравился, однако его цена оказалась слишком высока – мы заложили в нем слишком много «вкусняшек на вырост», что и сыграло отрицательную роль в судьбе этой разработки. Вердикт – неконкурентоспособен…
Соответственно, наш традиционный партнер по чипсетам компания STMicroelectronics тоже не сидела сложа руки и выпустила новый чипсет Teseo III. Это принципиально новая разработка с рядом функций, которые ранее были доступны только в приемниках профессионального уровня и, соответственно, высокого ценового диапазона. В то же время энергопотребление нового чипсета находится на уровне современных бытовых чипсетов ведущих производителей.
Как это получилось у ST – даже не представляю. Но получилось… Компания является нашим давним и проверенным партнером, мы имеем возможность применять самые новые и перспективные их разработки. Когда ST разработала великолепный Bluetooth LE чипсет BlueNRG, на его базе мы уже и разработали свой Bluetooth-модуль.
Какими серийными изделиями в настоящее время может похвастаться НАВИА?
Мы запустили в серию два модуля на чипсете STA8088FG в разных форм-факторах, выпустили для них отладочные платы. Естественно, модули в процессе серийного выпуска претерпели некоторые изменения, которых от нас потребовала реальная эксплуатация. Так что это – серия, причем большая по российским меркам. Антенны НАВИА производятся малой серией.
Сейчас готовимся к серийному выпуску Bluetooth LE модуля BT-01A. Естественно, и к нему мы выпускаем отладочные платы. Ну и особо хочу отметить наше программное обеспечение – оно традиционно отслеживает изменения в тенденциях на рынке. Пока клиентам нужны были только данные о местоположении объекта, мы давали ему эти данные и еще чуть-чуть дополнительно. Потребовались данные для синхронизации времени – появилась и такая информация. Захотели получать информацию о погрешности – пожалуйста! Захотели работать с сервисом дифференциальной коррекции – никаких проблем!
Так что мы стараемся постоянно обеспечивать пользователя максимальным набором информации.
Что находится в разработке?
Сейчас мы разрабатываем новые навигационные модули на двух разных чипсетах – STA8090FG и MT3333. Модули будут выполнены в разных конструктивах и ориентированы на разные сегменты рынка. Многофункциональный модуль ML8090F будет выполнен в традиционном для нас форм-факторе ML8088sE с существенными дополнениями: к привычным 22 краевым выводам добавятся 32 LGA-вывода «на брюшке». Пользователю, желающему применить модуль «по минимуму», будет достаточно припаять только привычные краевые выводы, а тем, кто пожелает полностью реализовать потенциал нашего модуля, понадобится припаять все контакты. Благо, к контактам LGA пользователя уже давно приучают другие производители. Вообще, модуль ML8090F заслуживает отдельного большого разговора – в нем мы реализуем много интересных задумок. Модуль на чипсете MT3333 будет выполнен в нано-формате. Подробности я пока раскрывать не буду, подождите немного, и сами увидите.
По Bluetooth-модулям мы планируем сделать новую версию с особо малым энергопотреблением. Возможно, он не будет совместим по форм-фактору с BT-01A, но это и не нужно.
Хочу отметить, что традиционный ML8088sE получит новую версию – низковольтный ML8088LV. Дело в том, что традиционно в большинстве модулей внутренние узлы работают от напряжения питания не выше 2 В, а основное напряжение питания модулей ранее было принято равным 3,3 В. Разница в напряжениях чаще всего превращалась в тепло, не выполняя никакой полезной работы. По этой причине все больше и больше потребителей переходят на напряжение питания 1,8 В для своих приборов. Мы решили влиться в стройные ряды сторонников низковольтного питания и сделать модуль с напряжением питания 1,8 В. Естественно, при этом существенно снизится потребляемая модулем мощность.
В то же время мы добавляем модулю ранее не задействованные интерфейсы – и он становится готовым к работе с MEMS-датчиками для реализации функции Dead Reckoning (навигация в условиях плохого или отсутствующего сигнала от спутников). Программное обеспечение уже готово, модули скоро появятся.
Также мы планируем выпустить новые версии нашей антенны с уменьшенными габаритами.
Естественно, все наши изделия будут выпускаться в сопровождении сервисного оборудования – демонстрационные платы, программное обеспечение для ускорения процесса освоения и, естественно, техподдержка…
В каких областях и в каких странах применяется продукция НАВИА?
Ответ достаточно традиционный: там, где требуется получать данные о местоположении объекта. Автомобильные трекеры, переносное и полустационарное оборудование, координаты которого требуется знать…
Новые направления – синхронизация времени, высокоскоростные изменения и метеозонды. Россия, Казахстан, Украина, Китай, Сингапур, Германия – это те страны, с которыми мы работаем. Там находятся инженеры, с которыми мы контактируем по применению наших модулей. Возможно, есть еще страны, инженеры из которых еще не связывались с нами.
Какое из применений вам наиболее запомнилось?
Наиболее запомнилось применение нашего модуля в метеозонде. Да, мы имели предварительную информацию о том, что модуль должен работать на больших высотах (более 18 км), но, знаете ли, сомнения все равно оставались. И вот когда наш заказчик сообщил, что метеозонд нормально поднялся на 38 км и наш модуль отработал нормально все это время, вот тогда действительно был восторг!
Участвовала ли продукция НАВИА в международных выставках?
Да, конечно! Первый «бенефис» НАВИА был на выставке CeBit 2012 в Ганновере (Германия). Модуль понравился, он успешно принимал сигналы через небольшие окна в потолке выставочного зала. Потом была выставка Electronica 2012 в Мюнхене. Тоже успешно, масса интереса к нашим модулям. В 2013 г. мы принимали участие в выставках Telematics India 2013 в городе Пуна (Индия) и ElectronicAsia 2013 в Гонконге.
В 2014 г. мы также принимали участие в выставках ElectronicAsia 2014 в Гонконге и Electronica 2014 в Мюнхене. Так что нас хорошо знают за рубежом.
Какова динамика выпуска продукции НАВИА?
На этот вопрос я не могу ответить с высокой точностью, однако динамика примерно такова: 2011 г. – 1500 шт.; 2012 г. – 90 тыс. шт.; 2013 г. – 110 тыс. шт. В 2014 г. ожидается объем в 400 тыс. шт.
Вестник Электроники, №4, 2014, скачать статью
Статьи >> Bluetooth-модули НАВИА BT-01
Автор статьи:
Иван Гончаров
В настоящее время многие современные гаджеты содержат Bluetooth-чипсеты – наручные часы, связанные с телефоном по технологии Bluetooth LE (Low Energy), гаджеты для фитнеса и прочие потребительские вещи. Широкое применение Bluetooth 4.0 LE находит и в сфере М2М. В статье рассматривается новый продукт под брендом НАВИА – Bluetooth-модуль BT-01.


Таблица 1. Технические характеристики модуля
Модуль НАВИА BT-01 предназначен для обеспечения надежного и стабильного радиоканала передачи данных в диапазоне 2,4 ГГц. Он работает в стандарте Bluetooth LE и совместим с модулями других производителей, поддерживающими этот стандарт.
НАВИА BT-01 представляет собой законченное устройство на базе чипсета BlueNRG производства STMicroelectronics с выводами UART и GPIO. Краевые площадки позволяют легко и быстро интегрировать модуль в конечное изделие заказчика либо в плату разрабатываемого устройства. Устройство выпускается в двух исполнениях – НАВИА BT-01A со встроенной антенной и НАВИА BT-01, разработанный для применения совместно со внешней антенной. Эти модули позволяют создать техническое решение с высокими характеристиками для обеспечения информационного обмена системы пользователя с внешним оборудованием при небольших затратах. Технические характеристики устройства приведены в таблице 1.
Описание NAVIA BT-01(А)
Внешний вид модулей NAVIA BT-01 и NAVIA BT-01A приве-ден на рис. 1 и 2.
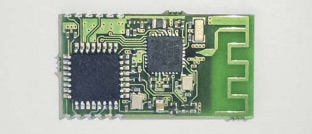
Рис. 1. Модуль Bluetooth НАВИА BT-01A (со встроенной антенной)
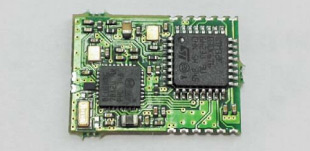
Рис. 2. Модуль Bluetooth НАВИА BT-01 (без антенны)
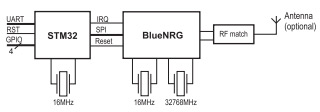
Рис. 3. Структурная схема модуля NAVIA BT-01
Структура модуля приведена на рис. 3. Назначение основных функциональных блоков:
- Управляющий процессор модуля STM32 осуществляет двусторонний обмен информацией с внешними устройствами и преобразование поступающей информации в формат, пригодный для обработки радиочастотным процессором.
- Радиочастотный процессор BlueNRG обеспечивает выполнение стека протокола Bluetooth LE и осуществляет формирование и прием высокочастотных сигналов.
- Цепь высокочастотного согласования с антенной RF match предназначена для согласования радиочастотного тракта процессора BlueNRG и антенны и фильтрации внеполосных помех.
- Кварцевые резонаторы 16 МГц и 32768 Гц предназначены для обеспечения работы процессоров STM32 и BlueNRG.
- Антенна предназначена для преобразования электрического сигнала в радиосигнал и обратно. Может быть выполнена в составе модуля или подключаться снаружи к специальным контактам модуля.
На структурной схеме не показаны цепи электропитания процессоров, так как они не влияют на информацию, циркулирующую в модуле.
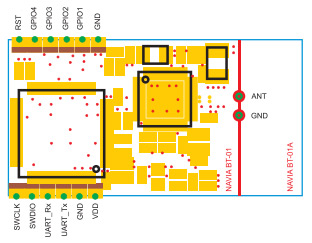
Рис. 4. Расположение выводов модуля NAVIA BT-01(A)
Вариант исполнения модуля NAVIA BT-01 имеет выводы ANT и GND для подключения внешней антенны, а NAVIA BT-01A снабжен встроенной антенной и не требует подключения внешней антенны.
На рис. 4 и в таблице 2 приведены расположение и назначение выводов модуля NAVIA BT-01(A).
На нижней поверхности модуля расположен вывод BOOT, предназначенный для производственных целей. В устройстве пользователя этот вывод не должен быть подключен к каким-либо цепям (т. е. должен быть оставлен «в воздухе»).
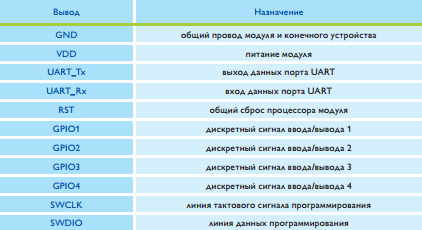
Таблица 2. Назначение выводов модуля
Комментарий специалиста
 Алексей Танцюра, support@naviawireless.ru
Алексей Танцюра, support@naviawireless.ru
Сегодня Bluetooth-модули NAVIA BT-01 способны решить ряд задач, связанных с системами АСКУЭ и не только. При помощи смартфона или планшетного компьютера можно связаться со счетчиком, в который интегрирован наш модуль, и получать данные по показаниям электроэнергии. Или другой пример: использование в ОПС для связи и управления охранной системой дома при помощи смартфона. И это только часть задач, которые можно решить при помощи Bluetooth-модуля. В дальнейшем планируется внедрить АТ-команды для управления модулем, для упрощения работы или тестирования со стороны заказчика. Кроме того, планируется расширение линейки модулей.

Рис. 5. Подключение выводов модуля NAVIA BT-01(A) к микроконтроллеру
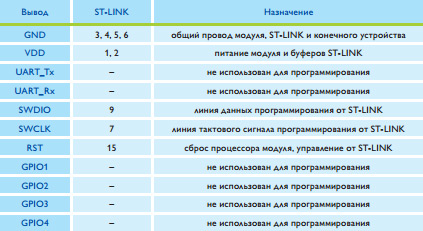
Таблица 3. Подключение программатора к модулю
Схема включения модуля
На рис. 5 показано подключение выводов модуля NAVIA BT-01(A) к микроконтроллеру. Подключение выводов модуля GPIO не приводится, так как эти выводы предназначены для подключения к ним различных устройств – кнопок, контактных датчиков, выходов различных изделий (при настройке выводов модуля как «входы») или входов устройств индикации, входов управления различными устройствами и т. д. (при настройке выводов модуля как «выходы»). Конкретное назначение выводов GPIO определяется программным обеспечением модуля и его настройками.
Программные интерфейсы обмена модулей NAVIA BT-01 и NAVIA BT-01A с устройством конечного пользователя описаны в документе «Модуль Bluetooth LE BT-01 Описание интерфейса обмена».
Подключение программатора ST-LINK к модулю
Для загрузки программного обеспечения в модуль следует использовать программатор ST-LINK V2. В таблице 3 указаны выводы модуля, к которым нужно подключать программатор.
Вестник Электроники, №4, 2014, скачать статью